
This is the exterior of the Bot. It's carapace (as it were) was seperately wired with four photo-resistive light-sensors, an IR demodulator, 2 LED's (for eyes), and 2 "bump" sensors. And it's furry.
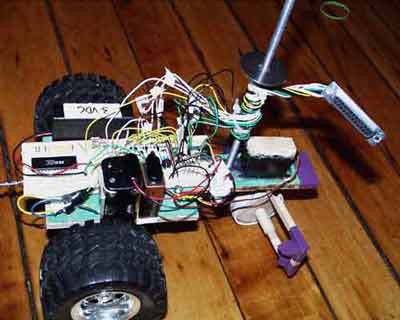
This is the interior. It was controlled by a Nettmedia BX-24 microcontroller. The drive-train and monster-truck wheels were salvaged from an abandoned toy. Scott designed the turning mechanism, which involved a servo-motor controlled by the BX-24. We had three seperate power sources - 3v for the drive motor (we stepped it down to keep it under control), 6v for the servo motor, and 9v for the BX-24. The furry carapace slid onto the threaded rod. The DB 25 connector connected the wiring of the carapace to the breadboard and the BX.

From this angle you can clearly see the relay switches that we used to allow both forward and back controll of the drive motor. Because we only had simple single-pull single-throw switches on hand, we needed four to control the motor. The chip at the back was a 20 second sound recorder chip that we didn't end up using.
We wrote up some directions on how to integrate IR control with the BX-24. Click here to take a look.
If you have any questions, don't hesitate to email us.
Click here to return to Sasha's physical computing home page.
| Sasha Harris-Cronin sasha@mortalspaces.com | Scott Wolynski swolynsk@hotmail.com |
] mortalspaces [